This week I had to put PCB design on pause, as I was waiting to be able to speak with Shane about what he believes the problems was with the old ESC PCBs. We did discover the problem, Ben’s and my attempt at attaching the motors to the ESC PCBs without the actual connectors proved to be…. less than ineffectual. Accidental bridging was the cause of us blowing two traces on the PCBs.
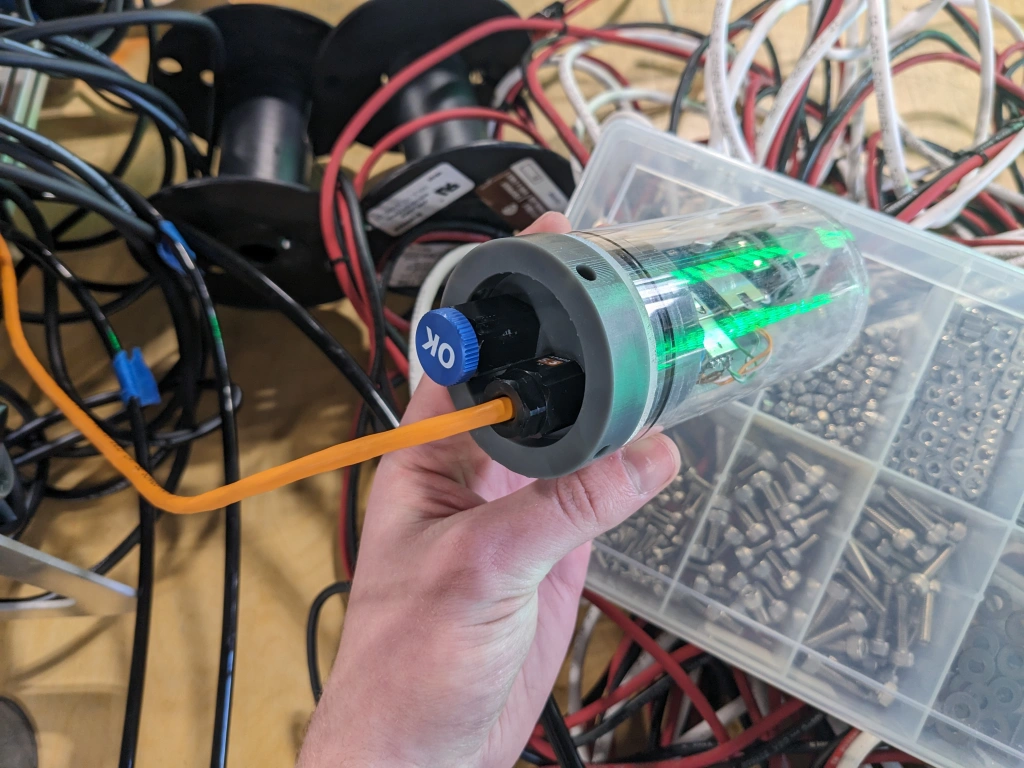
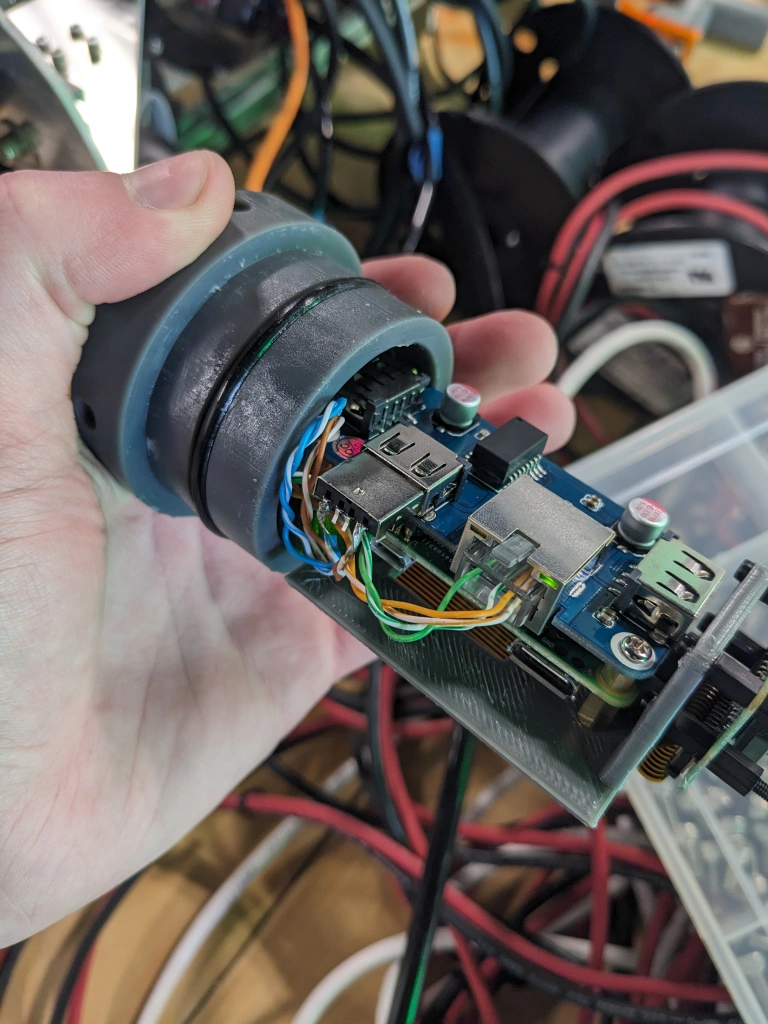
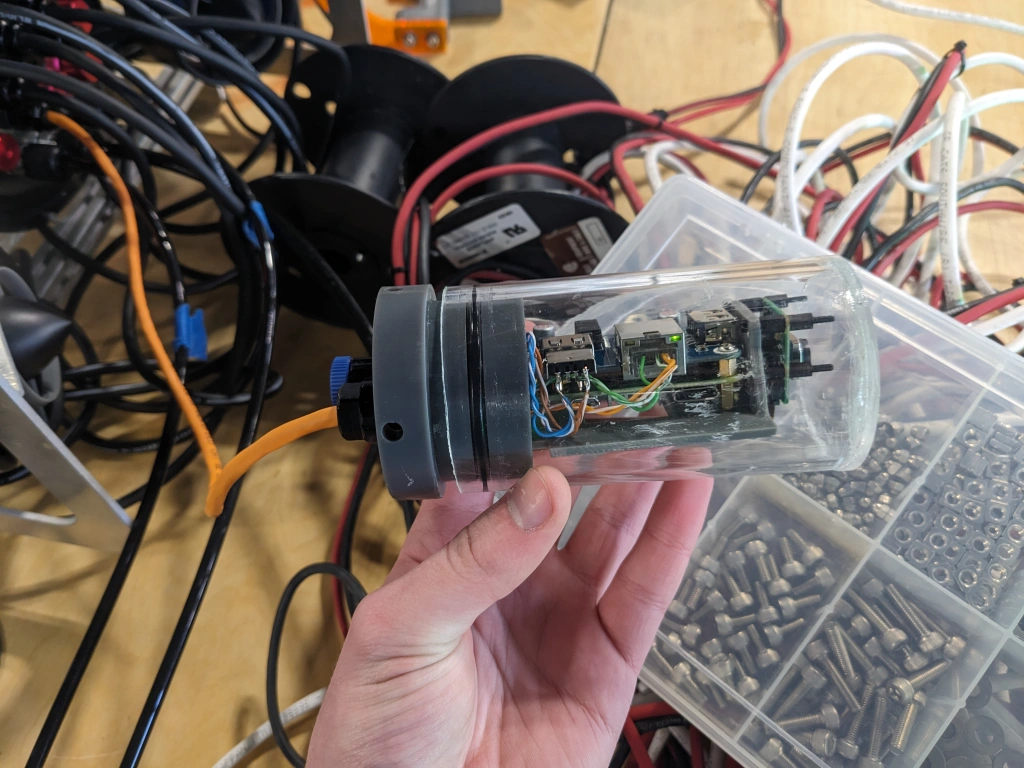
I assembled our downwards-facing camera this week, it employs the new 5V PoE “standard” we developed. It requires only a single CAT 5E cable to transmit both 5V power and 100mbps ethernet. I have yet to mount it, though, as I write this, the part is printing.
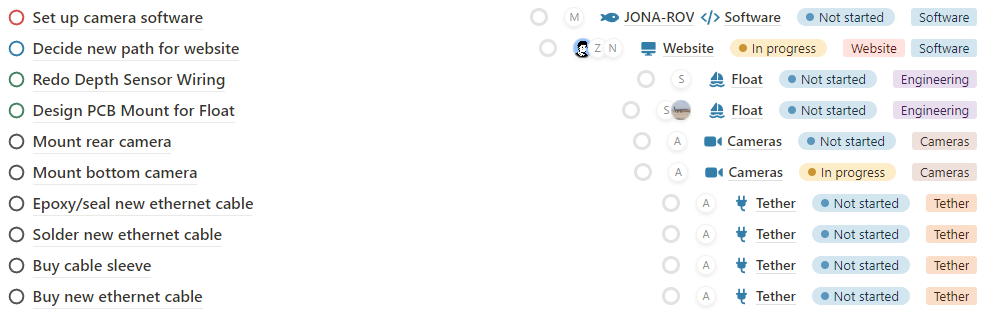
I also began adding all of the tasks I need to do to Sunk Robotics’ new task management system: Notion. I can certainly see the advantage of this system, but adding all of my tasks will be a pain (I will only have to do this many at a time once, though).