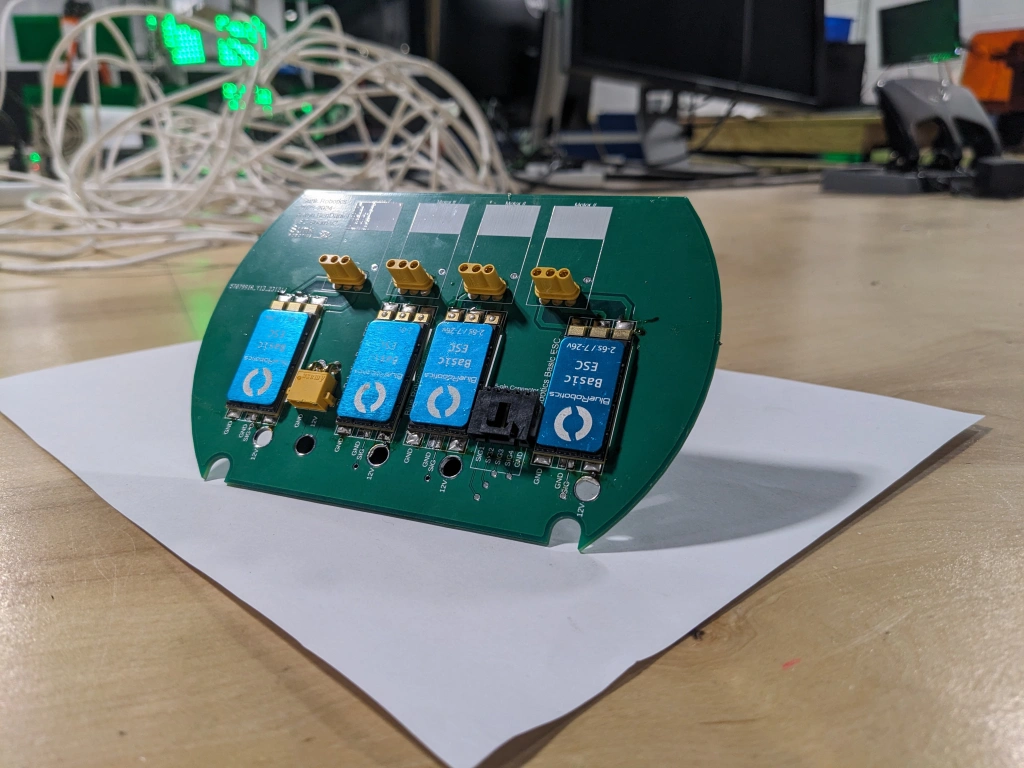
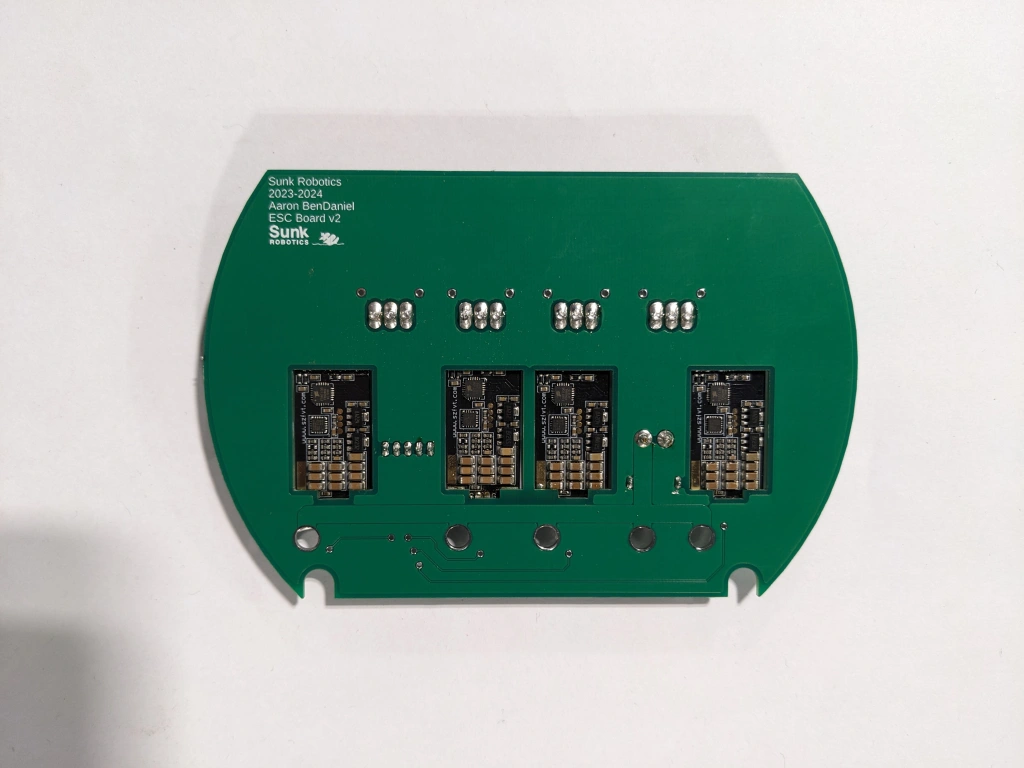
This week I entered what will hopefully be the final stage of building JONA ROV. The very last day of school before Christmas Break, the ESC PCB V2s arrived. This week I have begun assembling them. Their updated design allowed the ESCs to fit more flush against the PCB and makes surface-mount soldering them with solder paste easier.
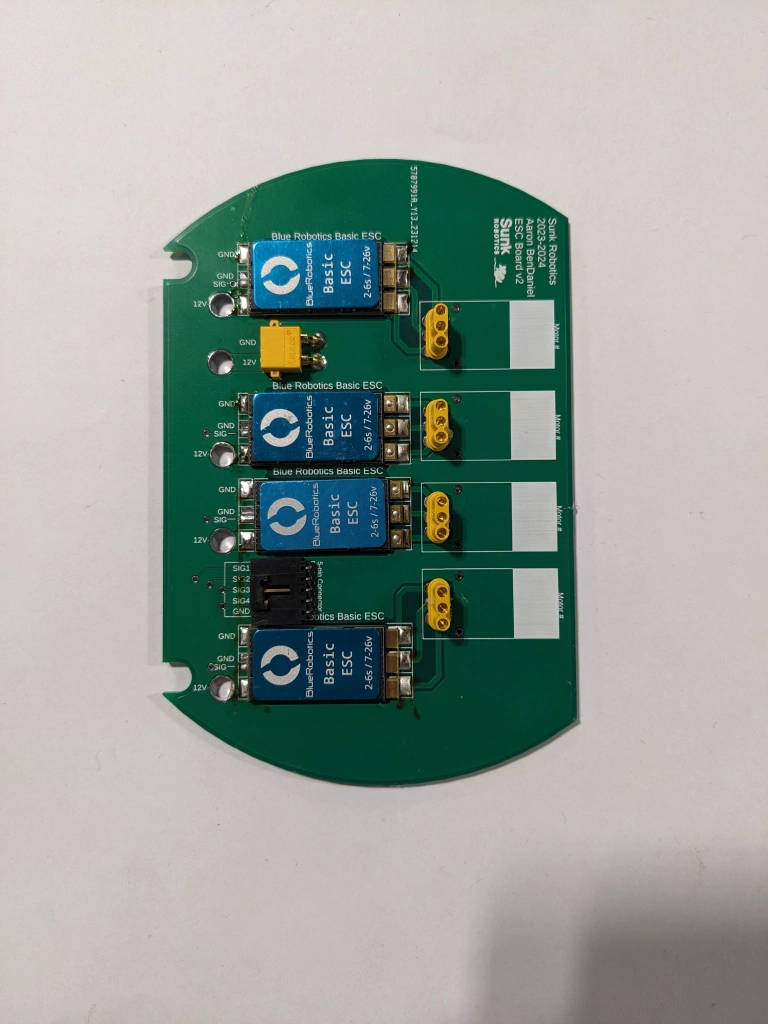
I have found a good method for soldering the ESC to these PCBs. I first add just enough solder paste to make a connection, soldering everything together, and then add more solder with a soldering iron and solder wire. This method has so far been consistent and I have one full ESC PCB V2 assembled.
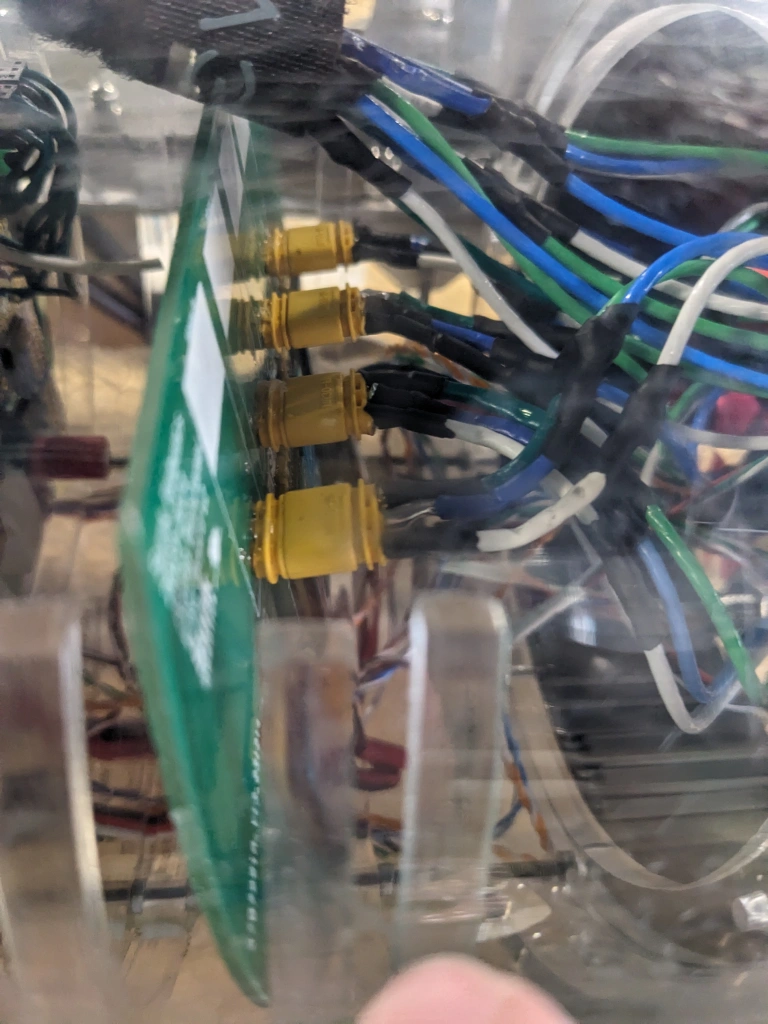
On Thursday I soldered the male XT30 connectors onto the thruster wires and soldered a female XT30 connector onto the power connector. I plugged everything together and the four thrusters connected to the new PCB successfully played the startup sound. I unfortunately am unable to actually drive the motors via the Raspberry Pi 4 without Matty, so they haven’t been tested all together yet. Each ESC was individually tested by myself as a soldered them, though, so I have confirmed that each unit does function.