This week was rather slow, as I was between projects and was doing a number of quick and small tasks.
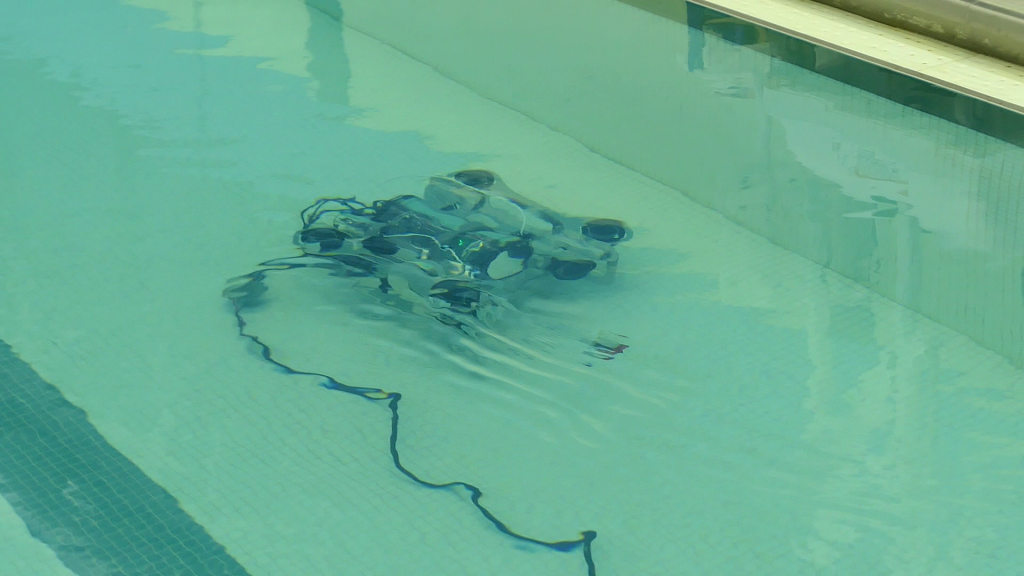
The main exciting thing that happened this week was that JONA finally got to take a swim in the pool. Unfortunately, the rear camera didn’t work due to a corrupted SD card (which might be due to a hard power-off or just a bad card) and there were… technical difficulties that led to the IMU not working during our testing. The IMU issue is fixed now, but that meant that we couldn’t test rotational PID this week.
The RPi4 is having power issues. I thought that I had solved this issue by decreasing the resistance in the 5V power systems, but the problem has reappeared. I don’t think that it is begin caused by the same source, though, this time. There is very little voltage drop, not enough to be causing this issue. I believe that out voltage regulator simply cannot supply enough current to power the 5V system. Unfortunately, I can’t accurately measure the current consumption of the ROV, as the Shop doesn’t have any tools to measure quick current spikes, which I believe to be the problem.
I haven’t confirmed the actual cause of the ROV’s problems, and am betting that it’s due to insufficient current supply. If increasing the available current still doesn’t solve the issue… I don’t know what I’ll do.
I also started designing a mechanical gripper for the ROV. I only did the very basic mechanical design before I handed it off to a prospective new member. Alex Pilika is a sophomore in the Robotics & Engineering shop and has expressed interest in joining the team. He has said that he will attempt to design a gripper, but honestly, I’m doubtful that it’ll actually get done in a reasonable amount of time. I guess I’ll see in the next week or so.