This week has been mainly taken up with my assembling of our 50ft tether. We originally built a 100ft tether because we didn’t want to ever run into a scenario where we didn’t have a long enough tether, but it turns out that the tether can be too long. JONA ROV works as is, but there is a significant voltage drop on the ROV side while drawing a large amount of current. The shorter tether should significantly reduce voltage drop, while still being more than long enough for the MATE ROV Competition.
We’re building a whole new tether, so we’ll still have our 100ft tether if we ever need the extra range.

Midway through the week, it looked like we’d need to put a hold on the 50ft tether for a few days as we did not end up having enough epoxy to seal the splices in the tether for the Blue Trail Engineering connectors. Luckily, Mr. Christy was able to pick up some epoxy on his way home and we were only set back one day instead of the rest of the week.
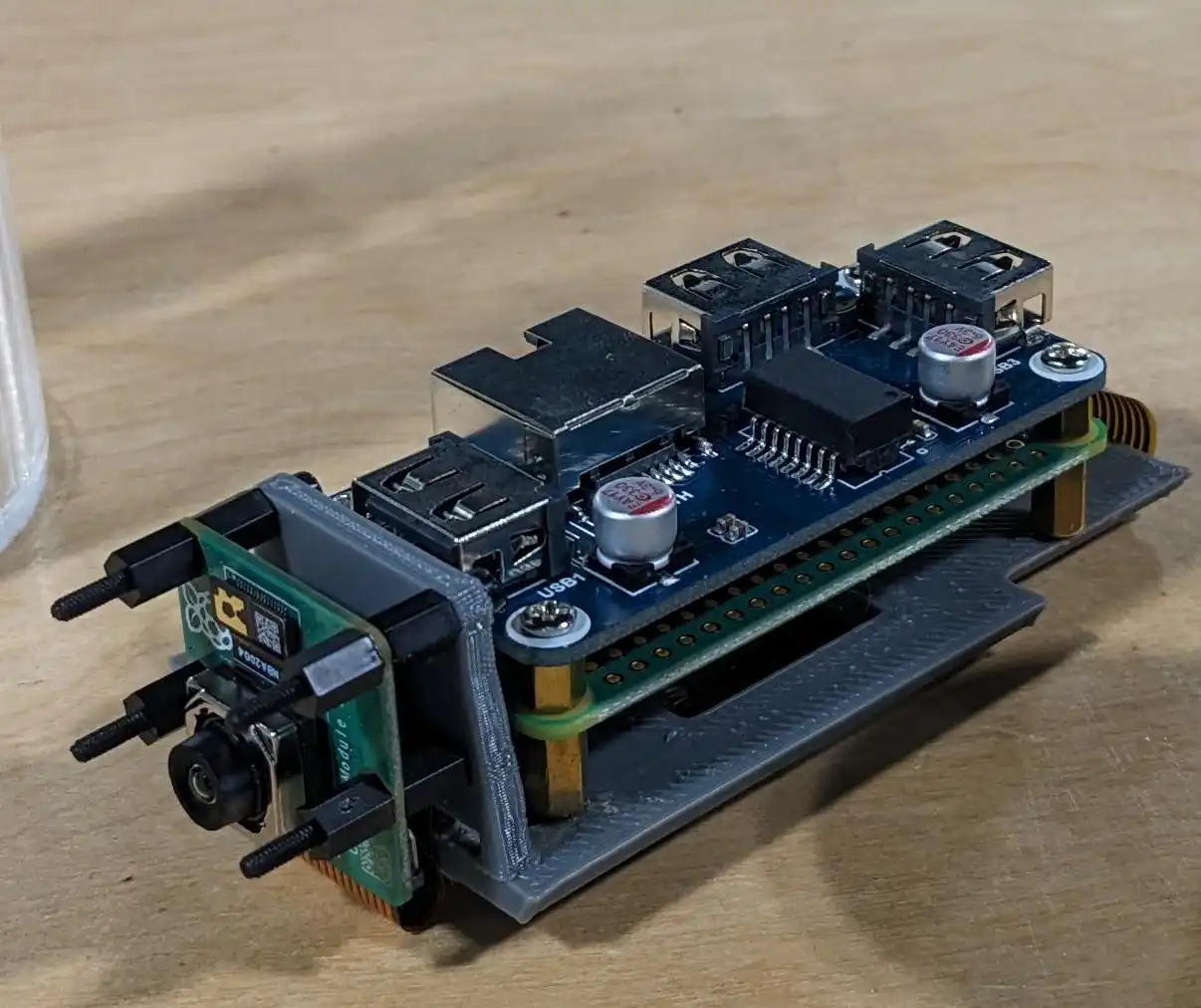
We’ve been having a very annoying and potentially competition-costing problem where the bottom camera is very inconsistent to turn on. Once it’s on, it’s stable, but getting it to turn on is a big pain and can take quite a few power cycles. I never really figured out the problem, as (in theory) the hardware in the bottom camera is identical to the back camera, which has had no issues whatsoever.
I had a hunch that maybe the RPi in the bottom camera was somehow broken or otherwise just less resilient to wonky power-ons, like what the ROV does on startup. I switched the hardware out for another camera module I had and, while I haven’t done extensive testing yet, it appears to have solved the problem. Hopefully this will significantly improve the reliability of JONA ROV.