The first two days of this week were spent finishing up refactoring my code. I couldn’t get it to run on an ATMEGA328… for some reason. I’m still not sure why. The algorithm should be able to run with the amount of RAM that microcontroller has, but apparently not. I have switched to an ESP32-S2 and the code now runs.
For now I’m using an Adafruit Feather ESP32-S2, but for my micromouse I think I want to use an Adafruit QT Py ESP32-S2. It has the same microcontroller as the board I’m using now, but it is much smaller.

After I finished with the code I began looking into hardware. I started with figuring out what motors and encoders I was going to use. The shop already had these super small DC motors with encoders already attached, so I’m going to use these. I learned how to use encoders and got it working with the ESP32-S2.
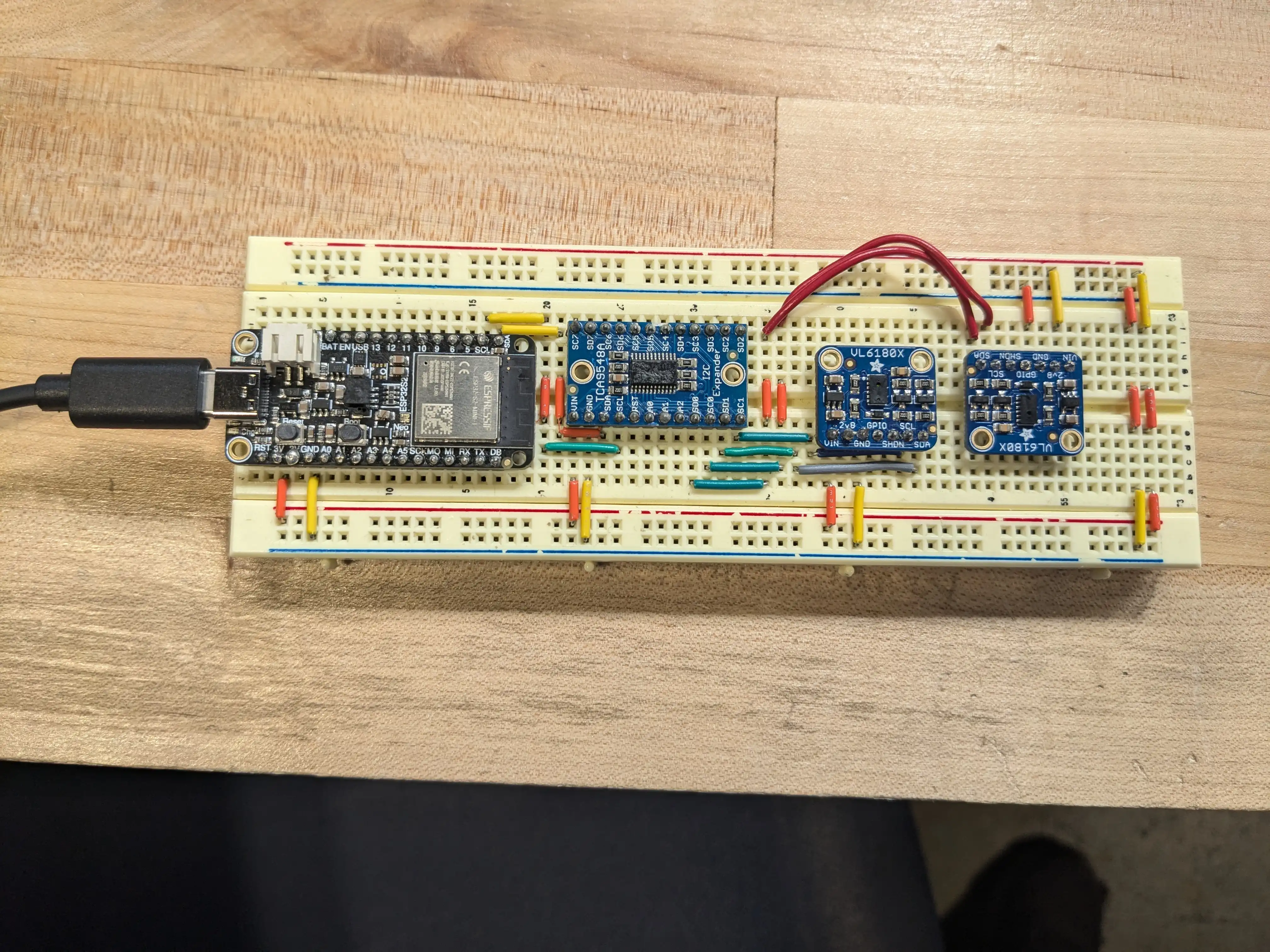
Lastly, I learned about Time of Flight sensors. They’re similar to LiDAR, but a single narrow cone instead of a full volumetric scanner. The units the shop already had were perfect, except for that they have a single hard-coded I2C address. This means that if I want to use multiple of them at once, (and I do) I need an I2C mutliplexer in order for them to not conflict with eachother. The shop also had those, and I got two working at once. My micromouse will have three.