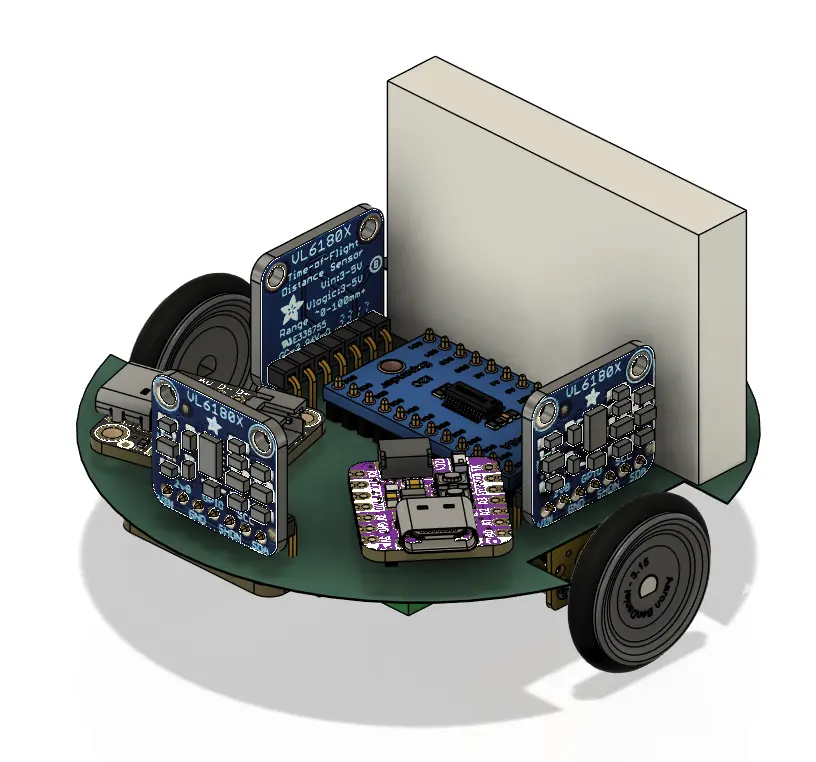
This week I finished up putting all of my parts into Fusion and I began designing my Micromouse. I’m only just now appreciating just how small half-scale Micromice are. Each cell is 90mm by 90mm. This means that my micromouse needs to fit inside a 45mm circle, but because I want some tolerance, I’ve decided to squeeze everything into a 40mm circle. The wheel-wells take up quite a bit of space, which leaves barely enough room for everything else.
Finding a battery that stores enough power but can fit in the awkward space has been a challenge.
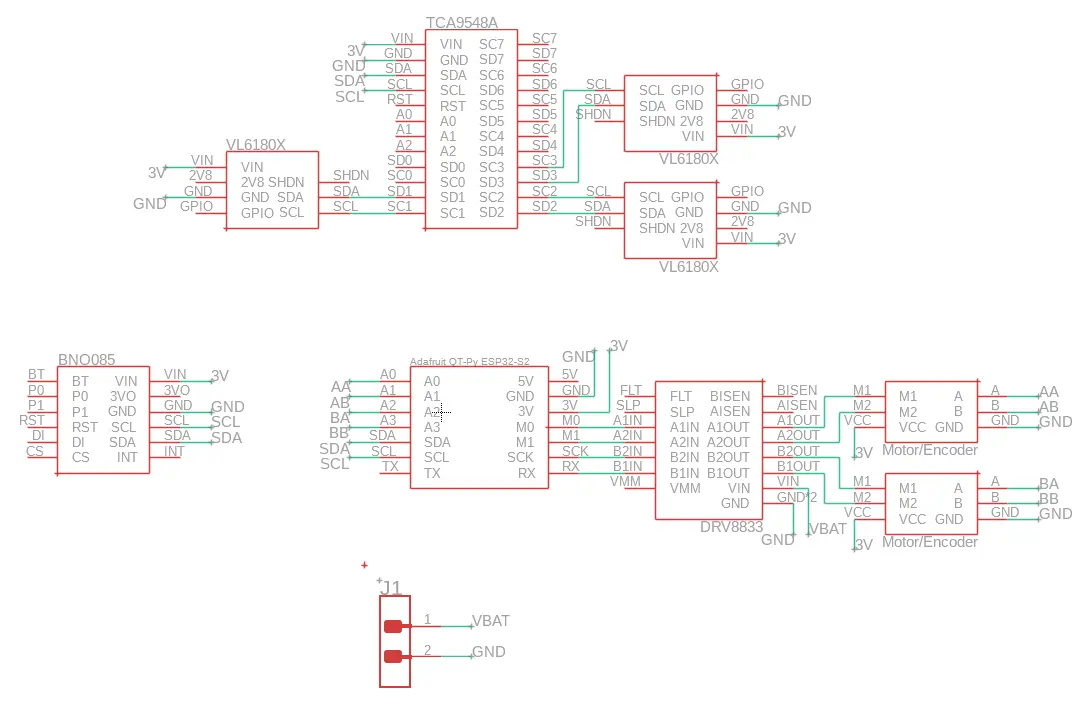
This is my preliminary schematic of my Micromouse. It’s missing a LiPo charger, but other than that I think it’s good. My PCB will almost certainly need to be double-sided, which we can manufacture in the shop. I might just order them from JLC PCB, as they’re pretty cheap and much higher quality.
I also wrote a super-duper simple version of a PID algorithm, it’s missing the “Integral” and “Derivative” parts, so I guess it’s just a “Proportional” algorithm. It oscillates some, but hopefully it should be good enough.