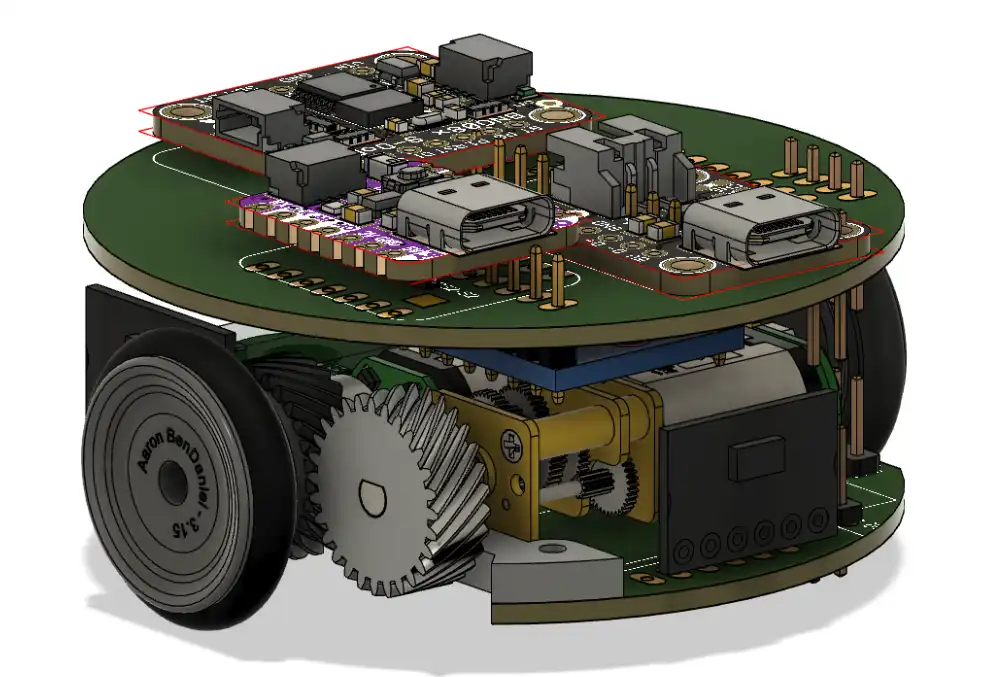
I spent this week doing two major things. The first one was designing the second iteration of my Micromouse. This new version features a stacked-PCB arrangement that significantly reduces the horizontal footprint of the robot. I hope I will actually be able to build this version. I haven’t thought too much about where the battery will go on this version, but I’m sure I’ll figure it out before too long.
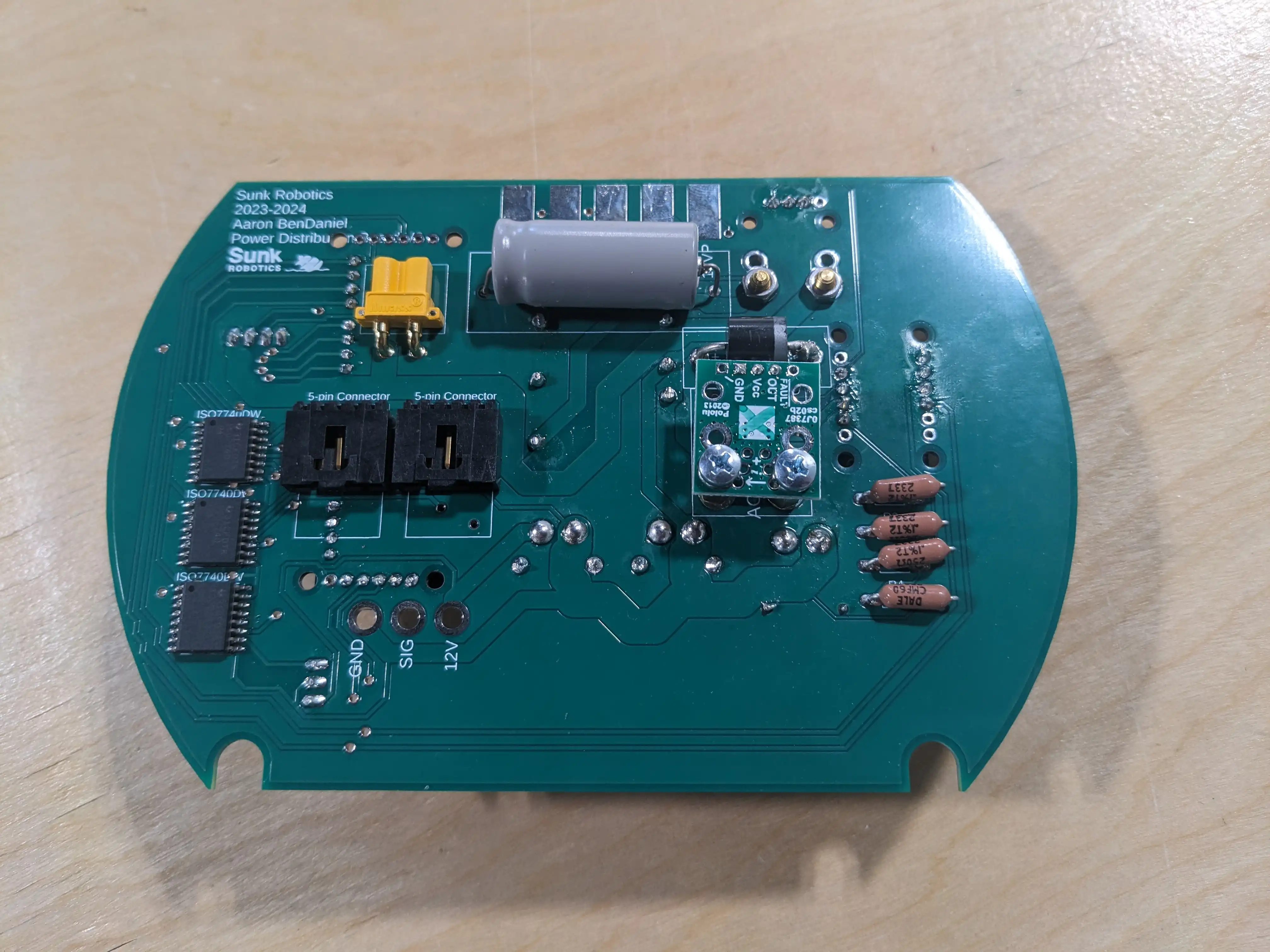
The other thing I did this week was help Miles Hilliard debug JONA ROV.
This year, I want to take a step back from Sunk Robotics for a few reasons, the first is that I’m quite burnt out from last year. I spent the entire year focusing almost solely on JONA ROV and while I did build a pretty cool ROV, I overdid it and I’m just tired of ROVs now. The other major reason is because I’m a senior and this is my last year with Sunk Robotics. The younger members (who won’t be gone next year) need to get as much experience as they can, so I want to let them do as much as possible, with my help available when they need it.
Getting back to what I did this week, Miles has taken on the electronics portion of JONA and I’ve been helping him with trying to work out the problems that we had with it last year. The power issues are very-much-so still around and Miles can hopefully find a solution to them. All of this started, though, with isolating the problem exactly, which was what Miles and I did this week.