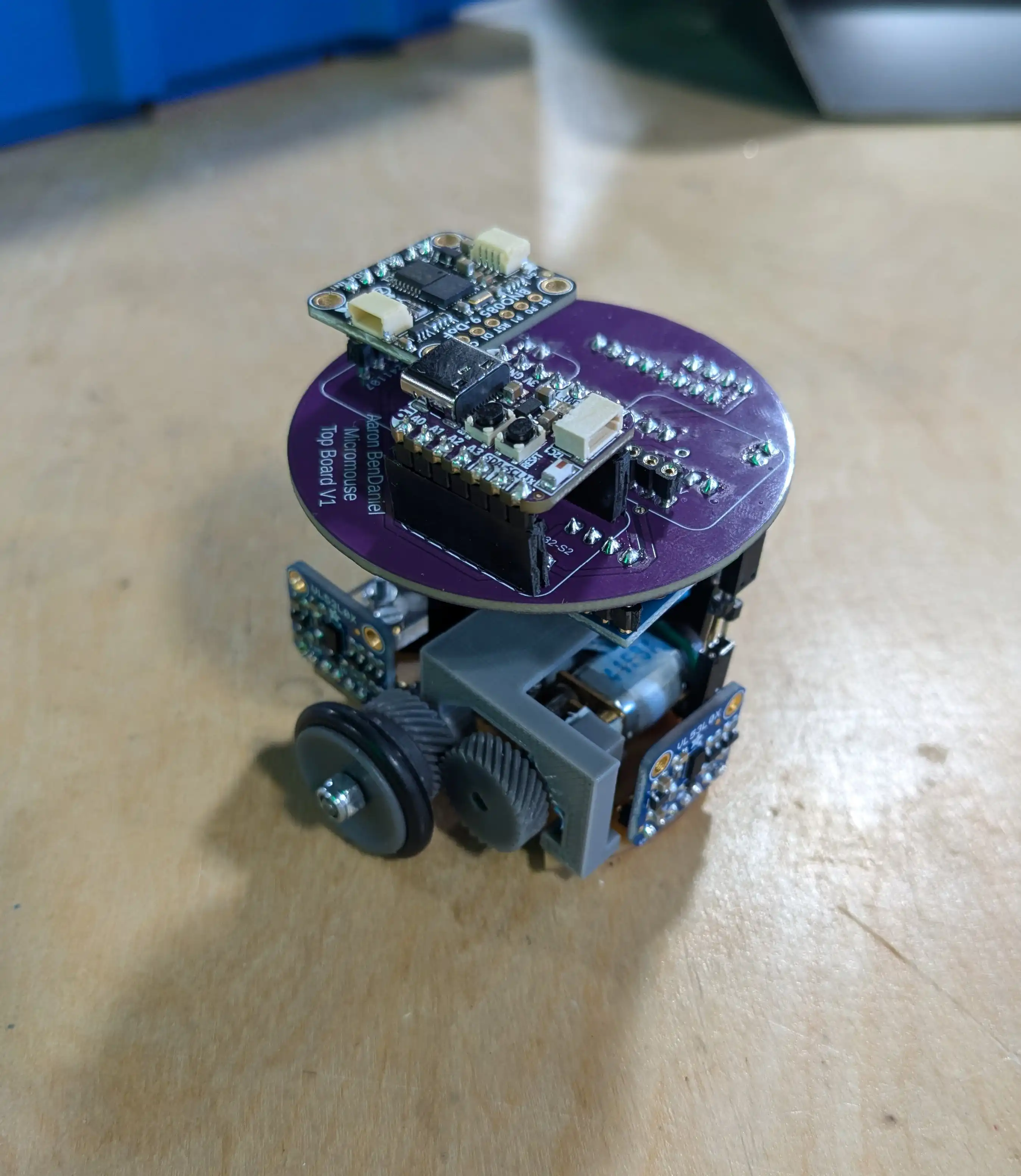
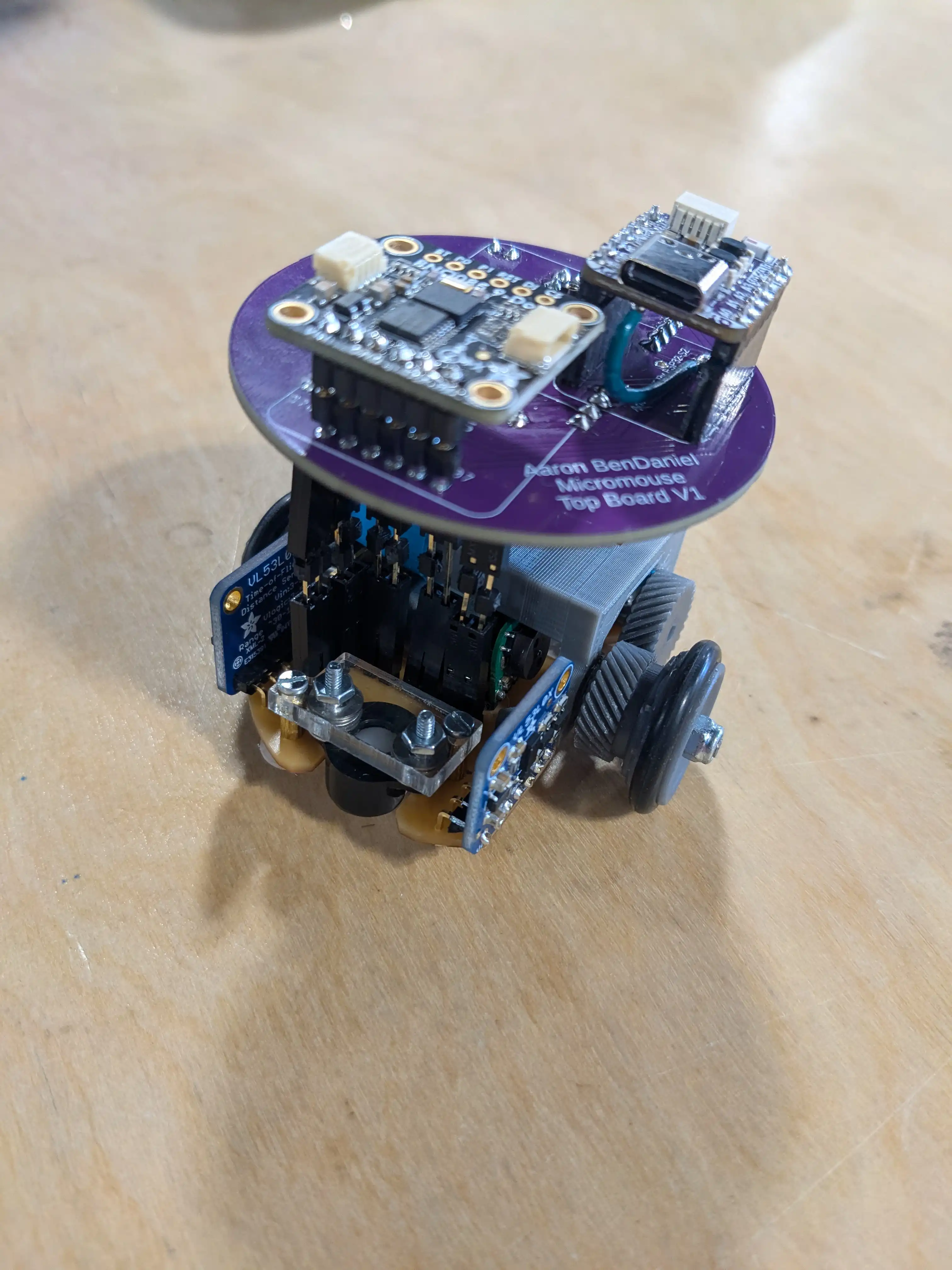
My PCBs arrived on Tuesday and I got straight to work on all the soldering and crimping needed to get everything assembled. I soldered lots of headers and crimped some extenders to raise the Top Board above the Bottom Board. Currently, they’re quite far apart and I’d like to minimize how tall my Micromouse is, so I’ll probably end up crimping some new extenders that are shorter.
I spent pretty much my whole week assembling hardware, but by Thursday I had finished and tested everything. I began writing the code to precisely control the movement of the robot, and it is looking to be more difficult and I had thought it would be. I have hope, though, and I believe that I’ll be able to get the level of precision I’m looking for. I’ll need to leverage the IMU and encoders to their fullest, and will probably need to implement PID control.